note
一、介绍
- 试试这篇文章的代码,一个简单加法,再一起知乎这篇理论就先简答了解。
- 接着可看看这个博主的这6篇文章,通过一个矩阵加法的例子,一步步讲了CUDA优化的若干种方法(我只感受了第一种,后面的优化就没写了)。
- 主要的系统学习就是谭升的博客。
- SM:Streaming Multiprocessor
进阶时用吧:
-
cuda-sample:官方项目,用来介绍每一个特性的,比较多,一一看不现实,自己到时候酌情吧
然后cuda 安装后,是自带了很多演示demo,它可能涉及得更广,每个都很强,可能都还会带有shader的编写。
- thrust:英伟达开源的c++并行算法库,我看cuda的sample里有大量用到。
- 看要要结合 《Professional CUDA C Programming》这本书 来做,这有一个算是中文导读吧。
再再进阶:(开源项目代码) 有很多的CUDA源码可以供我们慢慢学习,我这就简单给几个典型的Transformer系列的加速代码了。
-
LightSeq:这是字节跳动开源的生成模型推理加速引擎,BERT、GPT、VAE等等全都支持,速度也是目前业界最快的之一。
-
FasterTransformer:这是英伟达开源的Transformer推理加速引擎。
-
TurboTransformers:这是腾讯开源的Transformer推理加速引擎。
-
DeepSpeed:这是微软开源的深度学习分布式训练加速引擎。
❝ 我mentor说,不需要看这些,然后甩给了我20行代码,说看懂了就行了。结果我看懂了,门还是没开QAQ,所以建议还是看看底层一些的原理,加深自己的理解,特别是我强推的那篇博客。 ❞
英伟达官方教程,全是英文的,且太冗长了,我只是入门了解的话就算了吧(以后吃这个饭,进阶再说)
最后看看这篇关于自定义算子op的教程。
二、理论知识
2.1. 简单demo
host指代CPU及其内存,而用device指代GPU及其内存。CUDA程序中既包含host程序,又包含device程序,它们分别在CPU和GPU上运行。同时,host与device之间可以进行通信,这样它们之间可以进行数据拷贝。典型的CUDA程序的执行流程如下:
- 分配host内存,并进行数据初始化;
- 分配device内存,并从host将数据拷贝到device上;
- 调用CUDA的核函数在device上完成指定的运算;
- 将device上的运算结果拷贝到host上;
- 释放device和host上分配的内存。
__global__:在device上执行,从host中调用(一些特定的GPU也可以从device上调用),返回类型必须是void,不支持可变参数参数,不能成为类成员函数。注意用__global__定义的kernel是异步的,这意味着host不会等待kernel执行完就执行下一步。__device__:在device上执行,单仅可以从device中调用,不可以和__global__同时用。__host__:在host上执行,仅可以从host上调用,一般省略不写,不可以和__global__同时用,但可和__device__,此时函数会在device和host都编译。
一个很简单的.cu代码:main.cu # 来源是这篇文章。
- 编译:==nvcc main.cu -o add_cuda==
- 查看详细使用时间分析:==nvprof ./add_cuda==
#include <iostream>
#include <cuda_runtime_api.h>
// Kernel function to add the elements of two arrays
// __global__ 变量声明符,作用是将add函数变成可以在GPU上运行的函数
// __global__ 函数被称为kernel,
// 在 GPU 上运行的代码通常称为设备代码(device code),而在 CPU 上运行的代码是主机代码(host code)。
__global__
void add(int n, float *x, float *y) {
int index = blockIdx.x * blockDim.x + threadIdx.x;
int stride = blockDim.x * gridDim.x;
for (int i = index; i < n; i+=stride) // 以上代码可以说固定了,出现次数多的话可以把它写成宏的形式,TensorRT.md中就是这么做的
{
y[i] = x[i] + y[i];
}
}
int main(void) {
cudaSetDevice(1); // 设置用哪张GPU
int N = 1<<20;
float *x, *y;
// 内存分配,在GPU或者CPU上统一分配内存
cudaMallocManaged(&x, N*sizeof(float));
cudaMallocManaged(&y, N*sizeof(float));
// initialize x and y arrays on the host
for (int i = 0; i < N; i++) {
x[i] = 1.0f;
y[i] = 2.0f;
}
// Run kernel on 1M elements on the GPU
int m_ThreadCount = 256; // 这也是 单个blockSize的大小,CUDA GPU 使用大小为 32 的倍数的线程块运行内核,因此 `blockSize` 的大小应该设置为32的倍数,例如128、256、512等
int numBlock = (N + m_ThreadCount - 1) / m_ThreadCount; // 确定 `blockSize` 之后(也就是m_ThreadCount),可以根据for循环的总个数`N`确定 `numBlock` 的大小;这样计算比直接N/m_ThreadCount更加保险,万一不能整除,c++的“/”会去掉小数。
add<<<numBlock, m_ThreadCount>>>(N, x, y);
// CPU需要等待cuda上的代码运行完毕,才能对数据进行读取
cudaDeviceSynchronize();
cudaFree(x); // Free memory
cudaFree(y);
return 0;
}
注:使用cudaMallocManaged 来分配内存,这种内存在表面上看在设备和主机端都能访问,但是内部过程和我们前面手动copy过来copy过去是一样的(tensorrt中就是host复制到device,运算完后再device复制到host),也就是memcopy是本质,而这个只是封装了一下。
开始系统,写一个hello_world.cu
#include <iostream> // #include<stdio.h>也可以,设置不需要头文件
__global__ void hello_world()
{
printf("GPU: Hello world!\n");
}
int main(int argc,char **argv) {
hello_world<<<1,10>>>(); // 1,10是随意的,这里
cudaDeviceReset();//if no this line ,it can not output hello world from gpu
return 0;
}
注:cudaDeviceReset()没有则不能正常的运行,因为这句话包含了隐式同步,GPU和CPU执行程序是异步的,核函数调用后成立刻会到主机线程继续,而不管GPU端核函数是否执行完毕,所以上面的程序就是GPU刚开始执行,CPU已经退出程序了,所以我们要等GPU执行完了,再退出主机线程。
2.2. 内存申请|拷贝类型
内存管理:
| 标准C函数 | CUDA C 函数 | 说明 |
|---|---|---|
| malloc | cudaMalloc | 内存分配 |
| memcpy | cudaMemcpy | 内存复制 |
| memset | cudaMemset | 内存设置 |
| free | cudaFree | 释放内存 |
最关键的一步,这一步要走总线:cudaError_t cudaMemcpy(void *dst, const void *src, size_t count, enum cudaMemcpyKind kind),内存拷贝过程,完成以下集中过程(cudaMemcpyKind kind):
- cudaMemcpyHostToHost
- cudaMemcpyHostToDevice
- cudaMemcpyDeviceToHost
- cudaMemcpyDeviceToDevice
函数执行成功则会返回 cudaSuccess 这个枚举值,否则会返回 cudaErrorMemoryAllocation,使用这个指令可以把错误信息翻译成详细信息:char* cudaGetErrorString(cudaError_t error);
2.3. grid、block
一个核函数只能有一个grid,一个grid可以有很多个块block,每个块可以有很多的线程,如图: 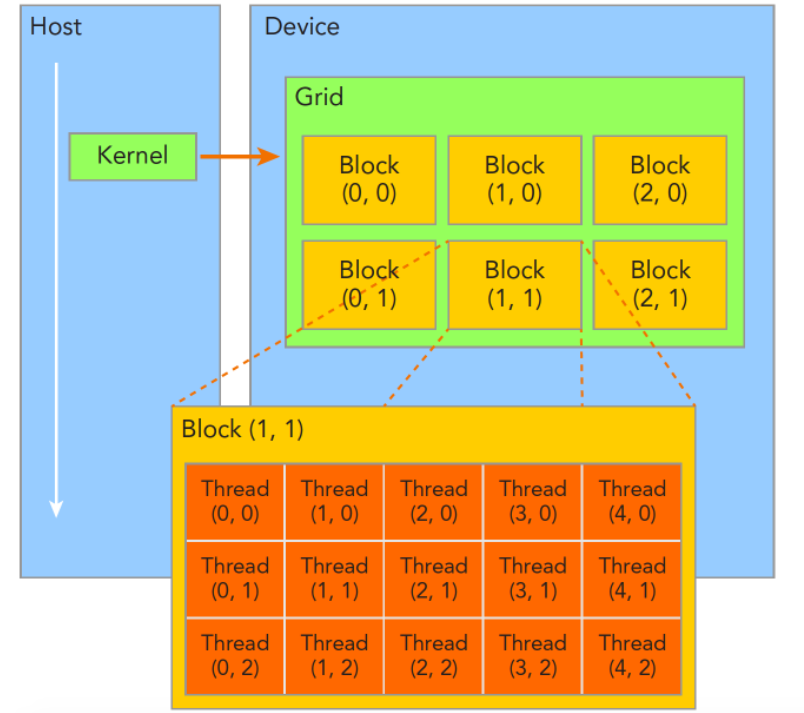
每个线程都执行同样的一段串行代码,怎么让这段相同的代码对应不同的数据?那就是让这些线程彼此区分开,依靠下面两个内置结构体确定线程标号:
- blockIdx(线程块在线程网格grid内的位置索引)
- threadIdx(线程在线程块block内的位置索引)
两个内置结构体基于 uint3 定义,包含三个无符号整数的结构,通过三个字段来指定:
- blockIdx.x
- blockIdx.y
- blockIdx.z
- threadIdx.x
- threadIdx.y
- threadIdx.z
上面这两个是坐标,要有同样对应的两个结构体来保存其范围,也就是blockIdx中三个字段的范围threadIdx中三个字段的范围:
- blockDim
- gridDim
他们是dim3类型(基于uint3定义的数据结构)的变量,也包含三个属性x,y,z.
网格和块的维度一般是二维和三维的,也就是说一个网格通常被分成二维的块,而每个块常被分成三维的线程。
可以使用dim3类型的grid维度和block维度配置内核,也可以使用int类型的变量,或者常量直接初始化:
kernel_name<<<4,8>>>(argument list);
上面这条指令的线程布局是:
当主机启动了核函数,控制权马上回到主机,而不是主机等待设备完成核函数的运行,前面的cudaDeviceReset();就是为了等待,同样想要主机等待设备端执行可以用下面这个指令:
cudaError_t cudaDeviceSynchronize();
2.4. 错误检查宏
错误的处理:基本函数执行后都会返回一个cudaError_t的枚举值,在开发阶段要检查错误,可以定义一个宏,在release时可以不要:
#define CHECK(call)\
{\
const cudaError_t error=call;\
if(error!=cudaSuccess)\
{\
printf("ERROR: %s:%d,",__FILE__,__LINE__);\
printf("code:%d,reason:%s\n",error,cudaGetErrorString(error));\
exit(1);\
}\
}
2.5. 打印硬件信息
#include <iostream>
#include <cuda_runtime.h>
void printGPUInfo(int deviceNum) {
cudaSetDevice(deviceNum); // 多gpu这里设置。
cudaDeviceProp devProp;
cudaError_t error = cudaGetDeviceProperties(&devProp, deviceNum);
if (cudaSuccess != error) return;
std::cout << "使用GPU device " << deviceNum << ": " << devProp.name << std::endl;
std::cout << "SM的数量:" << devProp.multiProcessorCount << std::endl;
std::cout << "每个线程块的共享内存大小:" << devProp.sharedMemPerBlock / 1024.0 << " KB" << std::endl;
std::cout << "每个线程块的最大线程数:" << devProp.maxThreadsPerBlock << std::endl;
std::cout << "每个SM的最大线程数:" << devProp.maxThreadsPerMultiProcessor << std::endl;
std::cout << "每个SM的最大线程束数:" << devProp.maxThreadsPerMultiProcessor / 32 << std::endl;
}
int main() {
printGPUInfo(1);
return 0;
}
三、内存模型,流,事件
cuda内存模型、层次结构,文章地址。
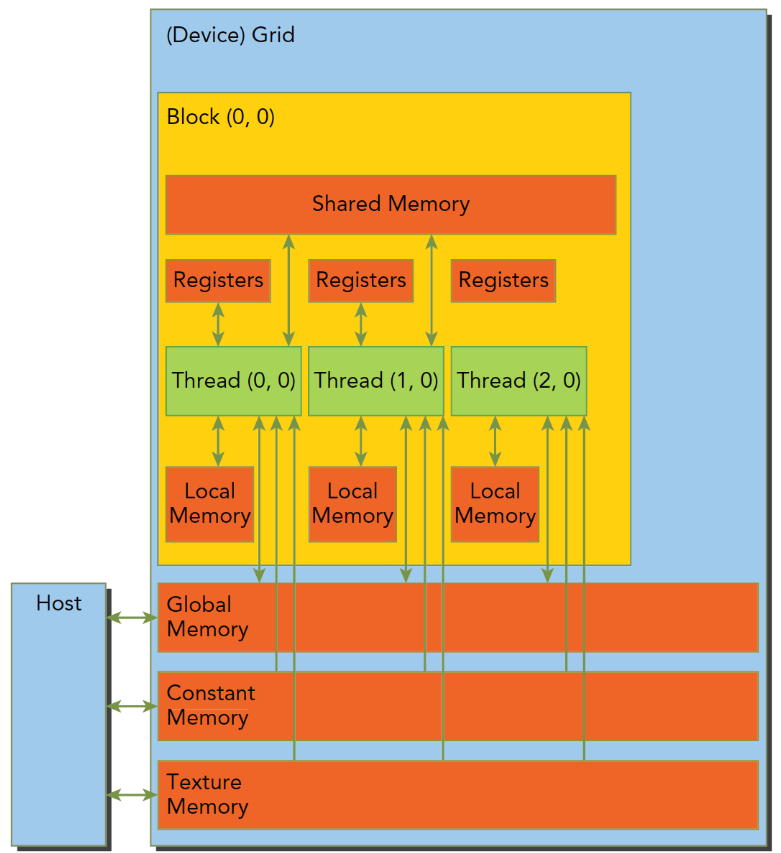
CUDA内存模型相对于CPU来说那是相当丰富了,GPU上的内存设备有:
- 寄存器
- 共享内存
- 本地内存
- 常量内存
- 纹理内存
- 全局内存
为了避免寄存器溢出,可以在核函数的代码中配置额外的信息来辅助编译器优化,比如:
__global__ void
__lauch_bounds__(maxThreadaPerBlock,minBlocksPerMultiprocessor)
kernel_name(...) {
/* kernel code */
}
在核函数定义前加了一个 关键字 lauch_bounds,然后他后面对应了两个变量:
- maxThreadaPerBlock:线程块内包含的最大线程数,线程块由核函数来启动
- minBlocksPerMultiprocessor:可选参数,每个SM中预期的最小的常驻内存块参数。 注意,对于一定的核函数,优化的启动边界会因为不同的结构而不同 也可以在编译选项中加入 ==-maxrregcount=32== 来控制一个编译单元里所有核函数使用的最大数量。
因为共享内存是块内线程可见的,所以就有竞争问题的存在,也可以通过共享内存进行通信,当然,为了避免内存竞争,可以使用同步语句:
void __syncthreads();
CUDA变量声明总结:
| 修饰符 | 变量名称 | 存储器 | 作用域 | 生命周期 |
|---|---|---|---|---|
| float var | 寄存器 | 线程 | 线程 | |
| float var[100] | 本地 | 线程 | 线程 | |
| __share__ | float var* | 共享 | 块 | 块 |
| __device__ | float var* | 全局 | 全局 | 应用程序 |
| __constant | float var* | 常量 | 全局 | 应用程序 |
cuda流以及同步方式,还有事件,地址。cudaError_t cudaEventCreate(cudaEvent_t* event);
CUDA编程和普通的C++不同的就是,我们有两个“可运算的设备”也就是CPU和GPU这两个东西,这种情况下,他们之间的同步并不是每一步指令都互相通信执行进度的,设备不知道主机在干啥,主机也不是完全知道设备在干啥。但是数据传输是同步的,也就是主机要等设备接收完数据才干别的,也就是说你爸给你寄了一袋大米,然后老人家啥也不做,拨通电话跟你保持通话不停的问你收到了么?直到你回答收到了,这就是同步的。内核启动就是异步的,你爸爸又要给你钱花,去银行给你汇了五百块钱,银行说第二天到账,他就可以回家该干嘛干嘛了,而不需要在银行等一晚,第二天你收到了,打个电话说一声就行了,这就是异步的。异步操作,可以重叠主机计算和设备计算。 前面用的cudaMemcpy就是个同步操作,我们还提到过隐式同步——从设备复制结果数据回主机,要等设备执行完。当然数据传输有异步版本:
cudaError_t cudaMemcpyAsync(void* dst, const void* src, size_t count,cudaMemcpyKind kind, cudaStream_t stream = 0);
值得注意的就是最后一个参数,stream表示流,一般情况设置为默认流,这个函数和主机是异步的,执行后控制权立刻归还主机,当然我们需要声明一个非空流:
声明:cudaStream_t a;
资源还是要用cudaStreamCreate分配的:cudaError_t cudaStreamCreate(cudaStream_t* pStream);
当然后面就要回收资源,回收方式:
cudaError_t cudaStreamDestroy(cudaStream_t stream);
这个回收函数很有意思,由于流和主机端是异步的,你在使用上面指令回收流的资源的时候,很有可能流还在执行,这时候,这条指令会正常执行,但是不会立刻停止流,而是等待流执行完成后,立刻回收该流中的资源。这样做是合理的也是安全的。 当然,我们可以查询流执行的怎么样了,下面两个函数就是帮我们查查我们的流到哪了:
cudaError_t cudaStreamSynchronize(cudaStream_t stream);
cudaError_t cudaStreamQuery(cudaStream_t stream);
这两条执行的行为非常不同,cudaStreamSynchronize会阻塞主机,直到流完成(tensorrt中的代码就是用的和这个)。cudaStreamQuery则是立即返回,如果查询的流执行完了,那么返回cudaSuccess否则返回cudaErrorNotReady。
记录事件和计算运行时间:一段简单的记录事件时间间隔的代码
// create two events
cudaEvent_t start, stop;
cudaEventCreate(&start);
cudaEventCreate(&stop);
// record start event on the default stream
cudaEventRecord(start);
// execute kernel
kernel<<<grid, block>>>(arguments);
// record stop event on the default stream
cudaEventRecord(stop);
// wait until the stop event completes
cudaEventSynchronize(stop);
// calculate the elapsed time between two events
float time;
cudaEventElapsedTime(&time, start, stop);
// clean up the two events
cudaEventDestroy(start);
cudaEventDestroy(stop);
这段代码显示,我们的事件被插入到空流中,设置两个事件作为标记,然后记录他们之间的时间间隔。 cudaEventRecord是异步的,所以间隔不准,这是特别要注意的。